Research Projects
Variable Footprint Mobile Platform for Task Specific Demand in Compactness and Stability
Project Descriptions
For a mobile robotic platform, there exists a trade-off between stability and compactness. On one hand we can design a compact mobile platform capable of navigating around tight spaces, but will have decreased stability footprint. If a robotic manipulator is mounted on top of the platform, there will be the risk of it toppling over during motion. On the other hand we can design a mobile platform that has a large footprint radius. This mobile platform will be very stable, but will have issues navigating around tight spaces.
Our proposed idea is to come up with a mobile platform that can change its footprint on the fly during motion. In this way, the robot can increase its footprint radius to increase stability, or reduce its footprint to navigate around the tight space, We attached three decoupled powered caster wheels to scissor mechanisms that are in turn attached to the main mobile platform chassis. The decoupled powered caster wheels provide the actuation needed to move the mobile robot and to change its posture on the fly during motion.
Our proposed idea is to come up with a mobile platform that can change its footprint on the fly during motion. In this way, the robot can increase its footprint radius to increase stability, or reduce its footprint to navigate around the tight space, We attached three decoupled powered caster wheels to scissor mechanisms that are in turn attached to the main mobile platform chassis. The decoupled powered caster wheels provide the actuation needed to move the mobile robot and to change its posture on the fly during motion.
Skin Stretch Tactile Feedback for Sensory Substitution and Augmentation of Force Feedback
Project Descriptions
Despite the many benefits that surgical robotic systems brings to both surgeons and patients, haptic feedback is not incorporated in today's clinical surgical robotic systems due to stability and safety concerns. Researchers have attempted to convey this force information through other sensory channels in a technique called "Sensory Substitution". We attempted to convey this force information through a manner termed "Fingerpad skin deformation feedback". During everyday manipulation tasks, skin deformation feedback is present and contributes to the perception of forces. We hypothesize that skin deformation feedback could be an effective feedback modality to substitute or augment force feedback, and that this type of feedback can be more intuitively interpreted compared to other current sensory substitution methods such as vision and audio feedback.
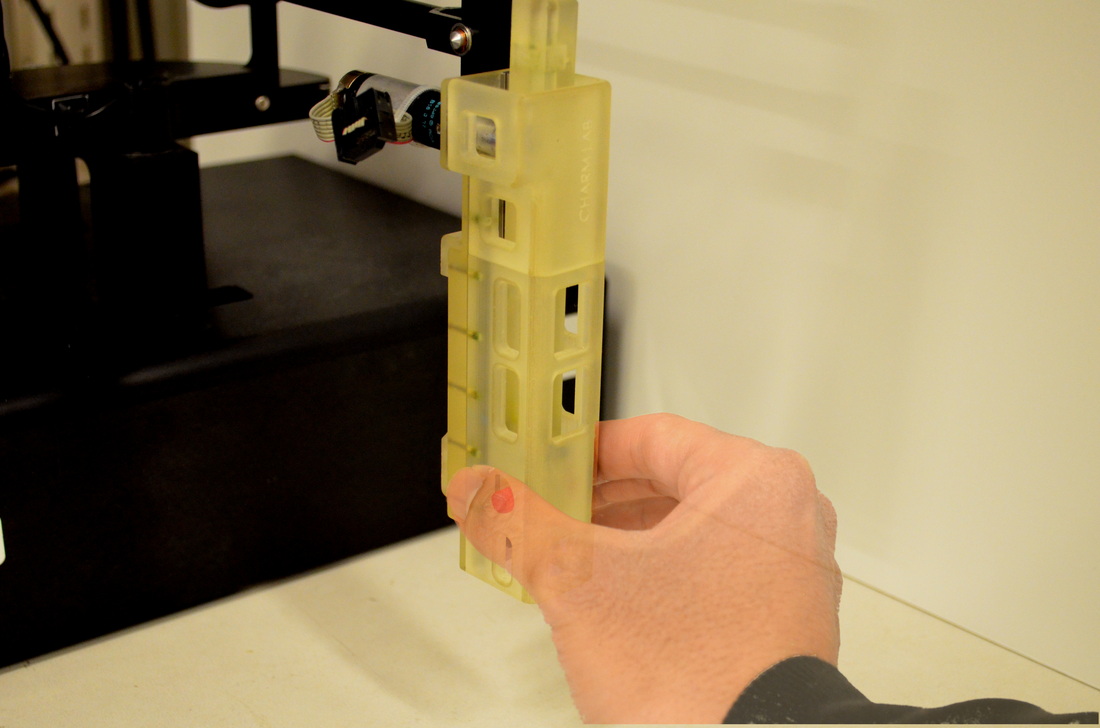
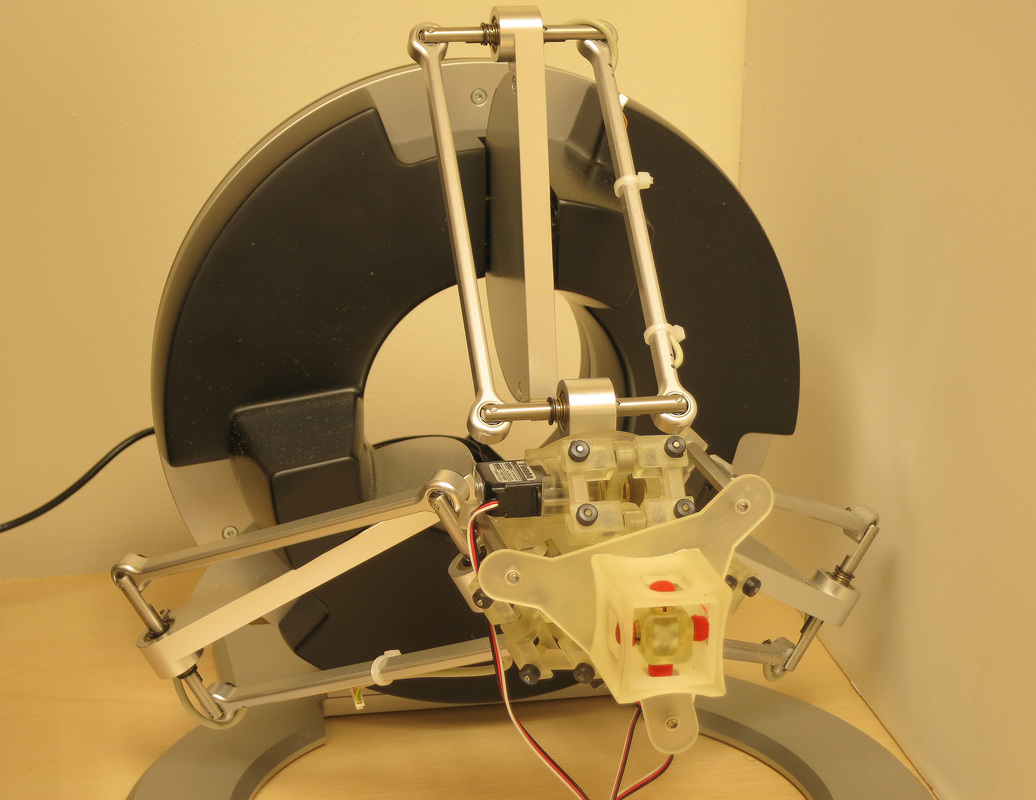
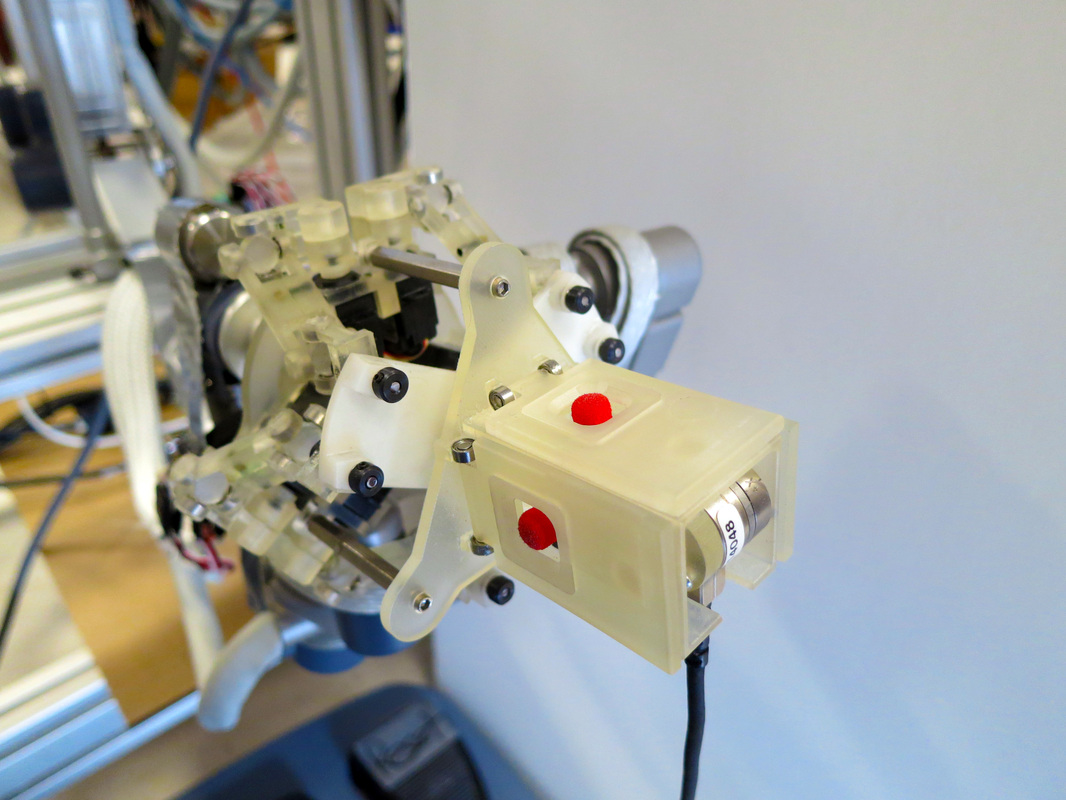
We built a series of skin deformation tactile haptic devices, ranging from 1-Degree-of-Freedom (DoF) tangential skin stretch device to 3-DoF and 6-DoF tangential and normal skin deformation feedback device. These devices are used in conjunction with traditional force-feedback haptic devices to perform experiments related to sensory substitution and augmentation.
We built a series of skin deformation tactile haptic devices, ranging from 1-Degree-of-Freedom (DoF) tangential skin stretch device to 3-DoF and 6-DoF tangential and normal skin deformation feedback device. These devices are used in conjunction with traditional force-feedback haptic devices to perform experiments related to sensory substitution and augmentation.
Related Publications
Z.F. Quek, S.B. Schorr, I. Nisky, W.R. Provancher, A.M. Okamura, "Sensory Substitution and Augmentation using 3-Degrees-of-Freedom Skin Deformation Feedback", IEEE Transactions on Haptics, vol. 8, no. 2, pp. 209-221, 2015.
Z.F. Quek, S.B. Schorr, I. Nisky, A.M. Okamura, W.R. Provancher, "Augmenting Stiffness Perception using a 1-DoF skin stretch device", IEEE Transactions on Human-Machine Systems, vol.44, no.6, pp.731,742, Dec. 2014
Z.F. Quek, S.B. Schorr, I. Nisky, W.R. Provancher, A.M. Okamura, "Sensory Substitution of Force and Torque using 6-Degrees-of-Freedom Tangential and Normal Skin Deformation Feedback", IEEE International Conference on Robotics and Automation, pp. 264-271, 2015.
S.B. Schorr, Z.F. Quek, I. Nisky, W.R. Provancher, A.M. Okamura, "Environment perception in the presence of kinesthetic or tactile guidance virtual fixtures", ACM/IEEE International Conference on Human-Robot Interaction, pp. 287-294, 2015.
S.B. Schorr, Z.F. Quek, I. Nisky, W.R. Provancher, A.M. Okamura, "Tactor-induced skin stretch as a sensory substitution method in teleoperated palpation", IEEE Transactions on Human-Machine Systems, vol. 45, no. 6, pp. 714–726, 2015.
Z.F. Quek, S.B. Schorr, I. Nisky, W.R. Provancher, A.M. Okamura, "Sensory Substitution using 3-Degrees-of-Freedom Tangential and Normal Skin Deformation Feedback", IEEE Haptic Symposium, pp. 27-33, 2014 (Best Student Paper Award)
Z.F. Quek, S.B. Schorr, I. Nisky, A. M. Okamura, and W. R. Provancher, "Sensory Augmentation of Stiffness using Fingerpad Skin Stretch", IEEE World Haptics, pp. 467-472, 2013.
S.B. Schorr, Z.F. Quek, I. Nisky, W.R. Provancher, A.M. Okamura, "Sensory Substitution via Cutaneous Skin Stretch Feedback", IEEE International Conference on Robotics and Automation, pp.2341,2346, 2013.
